
Antonio Arenella joins Aitronik as a Robotics Engineer

We are thrilled to announce that Antonio Arenella joins aitronik as a Robotics Engineer! Antonio brings a wealth of experience in robotics and a genuine passion for innovation. At the Università di Pisa, he contributed to developing highly autonomous aerial drones equipped with advanced mission management and obstacle avoidance capabilities. He also designed graphical simulation […]
Italian Agile Days 2024: my experience as a Scrum Master

At aitronik, we believe in continuous learning and staying ahead of industry trends. That’s why we’re proud to share the insights of Giovanni Marco Cordella, Scrum Master at aitronik, who attended the Italian Agile Days 2024 on November 8th and 9th. Over two days, Gianmarco explored the latest trends in agile practices, gained invaluable insights, […]
Back from EIMA International 2024
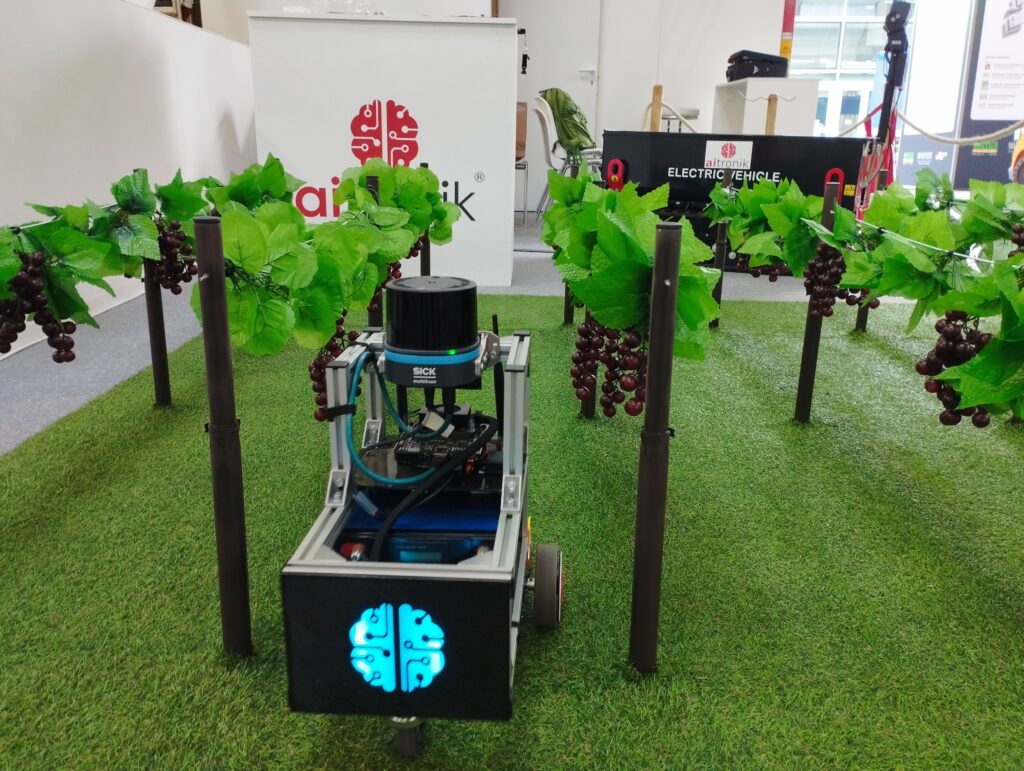
What an Experience at EIMA International 2024! For the first time, we decided to showcase our technology for autonomous operations at an international exhibition, choosing EIMA 2024, the International Agricultural and Gardening Machinery Exhibition. And from November 6th to 10th, EIMA recorded its highest attendance ever. The Innovation Factory welcomed over 346,000 attendees, including 63,000 […]
Techport Underwater Taxonomy event

The first TECHPORT Underwater Taxonomy event took place on Tuesday, October 22nd, in the beautiful setting of Palazzo Pancaldi in Livorno. Standardizing underwater systems is crucial for converging towards common platform logic rather than vendor-centric ones, ensuring compatibility and dissemination of devices developed by different vendors. The complexity of achieving this is undeniable. A few […]
EIMA 2024
We are pleased to inform you that we will be present at EIMA 2024, the International Agricultural and Gardening Machinery Exhibition. The appointment is in Bologna from November 6 to 10, where we will bring our experience in vehicle robotization. It will be a unique opportunity to share with manufacturers and insiders the most advanced […]